Explain the role of selective search for object detection
Explain the types of selective search
Selective Search algorithms play a crucial role in object detection within the field of computer vision and deep learning. Object detection involves identifying and locating objects within an image, and region proposal algorithms like Selective Search help in generating candidate regions or bounding boxes that are likely to contain objects of interest. Here's the role of Selective Search in the context of object detection with deep learning:
Region Proposal:
Selective Search is primarily used as a region proposal algorithm. It generates a diverse set of region proposals, each representing a potential bounding box around an object in the image.
Instead of exhaustively examining all possible image regions, Selective Search narrows down the search space, focusing on regions that are likely to contain objects.
Reduction of Computational Load:
Deep learning models for object detection can be computationally expensive, especially when processing high-resolution images. By using Selective Search, the model can focus on a smaller set of proposed regions rather than processing the entire image, reducing the overall computational load.
Handling Varied Object Sizes and Shapes:
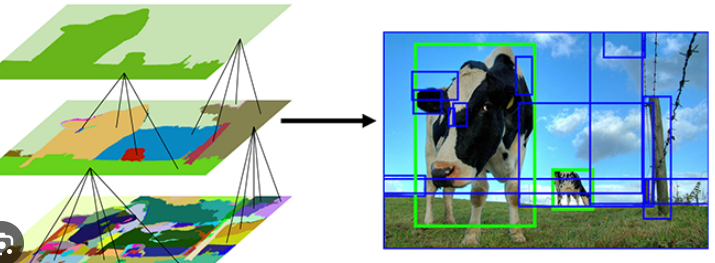
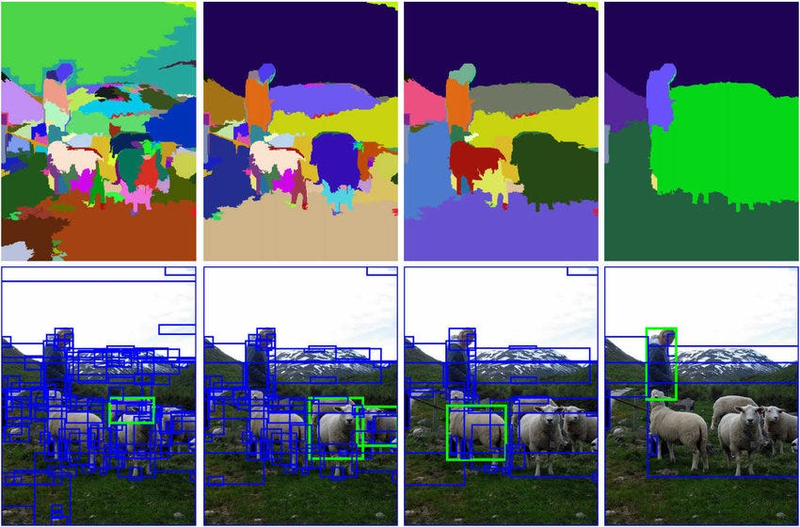
Selective Search employs multiple segmentation scales and grouping strategies to ensure that it captures regions of interest at various scales, shapes, and textures.
This diversity is crucial for handling objects of different sizes and shapes within the image.
Integration with Region-Based CNNs (R-CNN):
In early versions of object detection models like R-CNN, Selective Search is often used as a pre-processing step. It proposes candidate regions that are then fed into a Convolutional Neural Network (CNN) for further processing.
The CNN is responsible for classifying the proposed regions and refining the bounding box predictions.
Enabling End-to-End Training:
While early object detection models used Selective Search as a separate pre-processing step, more recent models (e.g., Faster R-CNN) integrate region proposal mechanisms directly into the end-to-end training process.
This integration allows the entire object detection pipeline, including region proposal and object classification, to be jointly trained, making the model more efficient.
Improving Model Efficiency:
By generating a smaller set of region proposals, Selective Search helps in improving the efficiency of the object detection model. The model can focus its computational resources on processing the most relevant regions, reducing the overall processing time.
Enabling Multi-Object Detection:
Selective Search is designed to handle images with multiple objects of varying sizes. This makes it suitable for scenarios where there are multiple objects of interest in a single image.
In summary, Selective Search algorithms serve as a valuable pre-processing step in object detection pipelines, helping to reduce the computational load and improve the efficiency of deep learning models. While more recent models have integrated region proposal mechanisms, Selective Search remains relevant in scenarios where a separate region proposal step is desired or necessary.
Explain the types of selective search
Selective Search is a family of algorithms designed to generate region proposals for object detection tasks in computer vision. These algorithms aim to identify and propose bounding boxes that likely contain objects of interest within an image. While there might be variations in the details, the core idea behind Selective Search is to use a combination of segmentation and grouping strategies to generate diverse and meaningful region proposals. Here are two main types of Selective Search algorithms:
Selective Search Segmentation:
Hierarchical Grouping: This is a key principle of Selective Search. The algorithm starts by over-segmenting the image into small regions using a segmentation method. These regions are then hierarchically merged based on certain similarity criteria.
Color-based Grouping: The algorithm considers color similarity between adjacent regions. Regions with similar color characteristics are merged together, creating larger segments.
Texture-based Grouping: Similar to color, texture information is used to group regions. Textured regions with similar characteristics are merged.
Size-based Grouping: Regions are grouped based on their size. This helps in capturing objects of different scales.
Selective Search Objectness:
Objectness Measure: In addition to segmentation and grouping, Selective Search Objectness employs an "objectness" measure to rank candidate regions. This measure is based on the likelihood that a region contains an object.
Color, Texture, and Size Filters: The objectness measure takes into account features such as color, texture, and size. Regions that stand out in terms of these features are considered more likely to contain objects.
Efficiency Improvement: Selective Search Objectness is designed to be more efficient than pure segmentation-based approaches. It aims to quickly identify a subset of promising region proposals for further consideration.
It's important to note that Selective Search is a generic framework, and the actual implementation details may vary. The two types mentioned above (Segmentation and Objectness) capture the essence of the core strategies used in Selective Search algorithms. Additionally, various enhancements and optimizations have been proposed over time to improve the accuracy and efficiency of region proposal generation.

Top comments (0)